|
|
Our goal is to design and fabricate a robotic arm with a hand that mimic operator's motion which means finger, wrist, and arm movements are reproduced. The robotic arm could be controlled by a glove with flex sensors, rotary encoders, and transceiver mounted on it. This method for controlling is more intuitive than others, the only thing that the operator would need to do is make movements with hands.
|
The Robot Hand
|
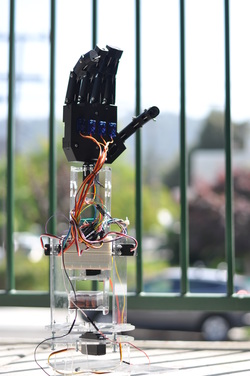
The robot hand, just like human hand, has three joints on each finger and five fingers in total except for the thumb finger which has additional one joint. Five servo motors are employed to individually control each finger to simulate human hand movements. Because of less cost and rapid processing time, the fingers and palm were entirely fabricated using 3D printing technology which uses acrylonitrile butadiene styrene (ABS) as material.
|

|
Torsional springs are used to help fingers return to its original position. This image shows you the slot (has the same shape as the torsional springs) where springs are fitted in. The other end of the spring is inserted into the connecting finger.
|

|
Each section of fingers are connected with screws and nuts, and driven by a 0.9mm polyster cord. As the servo pulls the cord, finger starts to bend till a point reaching the maximum torque output from the servo.
|
|
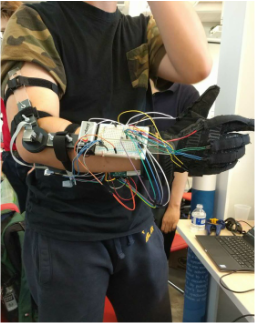
The gesture control glove combines five flex sensors and two encoders to capture human arm movements. With the use of a transmitter, the data being collected can be sent to the robot hand/arm wirelessly.
|
